
Цель работы – определить центр тяжести сложной фигуры аналитическим и опытным путями.
Теоретическое обоснование. Материальные тела состоят из элементарных частиц, положение которых в пространстве определяется их координатами. Силы притяжения каждой частицы к Земле можно считать системой параллельных сил, равнодействующая этих сил называется силой тяжести тела или весом тела. Центр тяжести тела – это точка приложения силы тяжести.
Центр тяжести – это геометрическая точка, которая может быть расположена и вне тела (например, диск с отверстием, полый шар и т.п.). Большое практическое значение имеет определение центра тяжести тонких плоских однородных пластин. Их толщиной обычно можно пренебречь и считать, что центр тяжести расположен в плоскости. Если координатную плоскость xOy совместить с плоскостью фигуры, то положение центра тяжести определяется двумя координатами:
где - площадь части фигуры, ();
– координаты центра тяжести частей фигуры, мм (см).
| Сечение фигуры | А, мм 2 | X c ,мм | Y c , мм |
 | bh | b/2 | h/2 |
 | bh/2 | b/3 | h/3 |
 | R 2 a | ||
| При 2α = π πR 2 /2 |
Порядок проведения работы .
Начертить фигуру сложной формы, состоящую из 3-4 простых фигур (прямоугольник, треугольник, круг и т.п.) в масштабе 1:1 и проставить ее размеры.
Провести оси координат так, чтобы они охватывали всю фигуру, разбить сложную фигуру на простые части, определить площадь и координаты центра тяжести каждой простой фигуры относительно выбранной системы координат.
Вычислить координаты центра тяжести всей фигуры аналитически. Вырезать данную фигуру из тонкого картона или фанеры. Просверлить два отверстия, края отверстий должны быть гладкими, а диаметр отверстий несколько больше диаметра иглы для подвешивания фигуры.
Подвесить фигуру сначала в одной точке (отверстии), прочертить карандашом линию, совпадающую с нитью отвеса. То же повторить при подвешивании фигуры в другой точке. Центр тяжести фигуры, найденный опытным путем, должны совпадать.
Определить координаты центра тяжести тонкой однородной пластины аналитически. Проверку произвести опытным путем
Алгоритм решения
1. Аналитический способ.
а) Чертеж вычертить в масштабе 1:1.
б) Сложную фигуру разбить на простые
в) Выбрать и провести оси координат (если фигура симметричная, то – по оси симметрии, в противном случае – по контору фигуры)
г) Вычислить площадь простых фигур и всей фигуры
д) Отметить положение центра тяжести каждой простой фигуры на чертеже
е) Вычислить координаты центра тяжести каждой фигуры
(по оси x и y)
ж) Вычислить координаты центра тяжести всей фигуры по формуле
з) Отметить положение центра тяжести на чертеже С (
2. Опытное определение.
Правильность решения задачи проверить опытным путем. Вырезать данную фигуру из тонкого картона или фанеры. Просверлить три отверстия, края отверстий должны быть гладкими, а диаметр отверстий несколько больше диаметра иглы для подвешивания фигуры.
Подвесить фигуру сначала в одной точке (отверстии), прочертить карандашом линию, совпадающую с нитью отвеса. То же повторить при подвешивании фигуры в других точках. Значение координат центра тяжести фигуры, найденных при подвешивании фигуры в двух точках: . Центр тяжести фигуры, найденный опытным путем, должны совпадать.
3.Заключение о положении центра тяжести при аналитическом и опытном определении.
Задание
Определить центр тяжести плоского сечения аналитическим и опытным путем.
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
Пример выполнения
Задача
Определить координаты центра тяжести тонкой однородной пластины.

I Аналитический способ
1. Чертеж вычерчивается в масштабе (размеры обычно даны в мм)
2. Сложную фигуру разбиваем на простые.
1- Прямоугольник
2- Треугольник (прямоугольник)
3- Площадь полуокружности (ее нет, знак минус).
Находим положение центра тяжести простых фигур точек , и

3. Проводим оси координат как удобно и отмечаем начало координат т. О.
4. Вычисляем площади простых фигур и площадь всей фигуры. [размер в см]
(3. нет, знак -).
Площадь всей фигуры
5. Находим координату ц.т. , и на чертеже.
6. Вычисляем координаты точек C 1 , C 2 и C 3
7. Вычисляем координаты точки C
8. На чертеже отмечаем точку
II Опытным путем

Координаты центра тяжести опытным путем .
Контрольные вопросы.
1. Можно ли рассматривать силу тяжести тела как равнодействующую систему параллельных сил?
2. Может ли располагаться центр тяжести все самого тела?
3. В чем сущность опытного определения центра тяжести плоской фигуры?
4. Как определяется центр тяжести сложной фигуры, состоящей из нескольких простых фигур?
5. Как следует рационально производить разбиение фигуры сложной формы на простые фигуры при определении центра тяжести всей фигуры?
6. Какой знак имеет площадь отверстий в формуле для определения центра тяжести?
7. На пересечении каких линий треугольника находится его центр тяжести?
8. Если фигуру трудно разбить на небольшое число простых фигур, какой способ определения центра тяжести может дать наиболее быстрый ответ?
Практическая работа №6
«Решение задач комплексного характера»
Цель работы: уметь решать задачи комплексного характера (кинематика, динамика)
Теоретическое обоснование: Скорость есть кинематическая мера движения точки, характеризующая быстроту изменения ее положения. Скорость точки представляет собой вектор, характеризующий быстроту и направление движения точки в данный момент времени. При задании движения точки уравнениями проекции скорости на оси декартовых координат равны:
Модуль скорости точки определяется по формуле
Направление скорости определяется направляющими косинусами:

Характеристикой быстроты изменения скорости является ускорение а. Ускорение точки равно производной от вектора скорости по времени:
При задании движения точки уравнения проекции ускорения на координатные оси равны:

Модуль ускорения:

Модуль полного ускорения
Модуль касательного ускорения определяется по формуле

Модуль нормального ускорения определяется по формуле
где – радиус кривизны траектории в данной точке.
Направление ускорения определяется направляющими косинусами

Уравнение вращательного движения твердого тела вокруг неподвижной оси имеет вид
Угловая скорость тела:
Иногда угловую скорость характеризуют числом оборотов в минуту и обозначают буквой . Зависимость между и имеет вид
Угловое ускорение тела:

Сила, равная произведению массы данной точке на ее ускорение и направление в сторону прямопротивоположную ускорению точки, называется силой инерции.
Мощностью называется работа, выполненная силой в единицу времени
Основное уравнение динамики для вращательного движения
– момент инерции тела относительно оси вращения, есть сумма произведений масс материальных точек на квадрат расстояний их до этой оси
Задание
Тело массой m с помощью троса, наматываемого на барабан диаметром d, перемещается вверх или вниз по наклонной плоскости с углом наклона α. Уравнение движения тела S=f(t), уравнение вращения барабана , где S в метрах; φ - в радианах; t – в секундах. P и ω - соответственно мощность и угловая скорость на валу барабана в момент конца разгона или начала торможения. Время t 1 – время разгона (из состояния покоя до заданной скорости) или торможения (от заданной скорости до остановки). Коэффициент трения скольжения между телом и плоскостью –f. Потерями на трение на барабане, а также массой барабана пренебречь. При решении задач принять g=10 м/с 2
| № вар | α, град | Закон движения | Напр движ | m, кг | t 1 , c | d, м | P, кВт | , рад/с | f | Опред. величины |
| S=0,8t 2 | Вниз | - | - | 0,20 | 4,0 | 0,20 | m,t 1 | |||
| φ=4t 2 | Вниз | 1,0 | 0,30 | - | - | 0,16 | P,ω | |||
| S=1,5t-t 2 | вверх | - | - | - | 4,5 | 0,20 | m, d | |||
| ω=15t-15t 2 | вверх | - | - | 0,20 | 3,0 | - | 0,14 | m,ω | ||
| S=0,5t 2 | Вниз | - | - | 1,76 | 0,20 | d,t 1 | ||||
| S=1,5t 2 | Вниз | - | 0,6 | 0,24 | 9,9 | - | 0,10 | m,ω | ||
| S=0,9t 2 | Вниз | - | 0,18 | - | 0,20 | P, t 1 | ||||
| φ=10t 2 | Вниз | - | 0,20 | 1,92 | - | 0,20 | P, t 1 | |||
| S=t-1,25t 2 | вверх | - | - | - | 0,25 | P,d | ||||
| φ=8t-20t 2 | вверх | - | 0,20 | - | - | 0,14 | P, ω |
Пример выполнения
Задача 1 (рисунок 1).
Решение 1. Прямолинейное движение (рисунок 1, а). Точка, двигавшаяся равномерно, в некоторый момент времени получила новый закон движения , и через некоторый промежуток времени остановилась. Определить все кинематические характеристики движения точки для двух случаев; а) движение по прямолинейной траектории; б) движение по криволинейной траектории постоянного радиуса кривизны r=100см
Рисунок 1 (а).
Закон изменения скорости точки
Начальную скорость точки найдем из условия:
Время торможения до остановки найдем из условия:
при , отсюда .
Закон движения точки в период равномерного движения
Расстояние, пройденное точкой по траектории за период торможения,
Закон изменения касательного ускорения точки
откуда следует, что в период торможения точка двигалась равнозамедленно, так как касательное ускорение отрицательно и по значению постоянно.
Нормальное ускорение точки на прямолинейной траектории движения равно нулю, т.е. .
Решение 2. Криволинейное движение (рисунок 1, б).
Рисунок 1 (б)

В этом случае по сравнению со случаем прямолинейного движения остаются без изменения все кинематические характеристики, за исключением нормального ускорения.
Закон изменения нормального ускорения точки
Нормальное ускорение точки в начальный момент торможения
Принятая на чертеже нумерация положений точки на траектории: 1 – текущее положение точки в равномерном движении до начала торможения; 2 – положение точки в момент начала торможения; 3 – текущее положение точки в период торможения; 4 – конечное положение точки.
Задача 2.
Груз (рис. 2, а) поднимается с помощью барабанной лебедки. Диаметр барабана d=0,3м, а закон его вращения .
Разгон барабана длился до угловой скорости . Определить все кинематические характеристики движения барабана и груза.


Решение . Закон изменения угловой скорости барабана . Начальную угловую скорость найдем из условия: ; следовательно, разгон начался из состояния покоя. Время разгона найдем из условия: . Угол поворота барабана за период разгона .
Закон изменения углового ускорения барабана , отсюда следует, что в период разгона барабан вращался равноускоренно.
Кинематические характеристики груза равны соответствующим характеристикам любой точки тягового троса, а значит, и точки A, лежащей на ободе барабана (рис. 2, б). Как известно, линейные характеристики точки вращающегося тела определяются через его угловые характеристики.
Расстояние, пройденное грузом за период разгона, . Скорость груза в конце разгона .
Ускорение груза .
Закон движения груза .
Расстояние, скорость и ускорение груза можно было определить и иначе, через найденный закон движения груза:
Задача 3.
Груз, перемещавшийся равномерно вверх по наклонной опорной плоскости, в некоторый момент времени получил торможение в соответствии с новым законом движения ![]() , где s – в метрах и t – в секундах. Масса груза m = 100кг, коэффициент трения скольжения между грузом и плоскостью f=0,25. Определить силу F и мощность на тяговом тросе для двух моментов времени: а) равномерное движение до начала торможения;
, где s – в метрах и t – в секундах. Масса груза m = 100кг, коэффициент трения скольжения между грузом и плоскостью f=0,25. Определить силу F и мощность на тяговом тросе для двух моментов времени: а) равномерное движение до начала торможения;
б) начальный момент торможения. При расчёте принять g=10 м/ .
Решение. Определяем кинематические характеристики движения груза.
Закон изменения скорости груза
Начальная скорость груза (при t=0)
Ускорение груза
Так как ускорение отрицательно, то движение – замедленное.
1. Равномерное движение груза.

Для определения движущей силы F рассматриваем равновесие груза, на который действует система сходящихся сил: сила на тросе F, сила тяжести груза G=mg, нормальная реакция опорной поверхности N и сила трения , направленная навстречу движению тела. По закону трения, . Выбираем направление координатных осей, как показано на чертеже, и составляем два уравнения равновесия для груза:
Мощность на тросе до начала торможения определим по известной формуле
Где м/с.
2. Замедленное движение груза.

Как известно, при неравномерном поступательном движении тела система действующих на него сил по направлению движения не является уравновешенной. Согласно принципу Даламбера (метод кинетостатики), тело в этом случае можно считать находящимся в условном равновесии, если ко всем действующим на него силам добавить силу инерции , вектор которой направлен противоположно вектору ускорения. Вектор ускорения в нашем случае направлен противоположно вектору скорости, так как груз движется замедленно. Составляем два уравнения равновесия для груза:
Мощность на тросе в момент начала торможения
Контрольные вопросы.
1. Как определить численное значение и направление скорости точки в данный момент?
2. Что характеризует нормальная и касательная составляющие полного ускорения?
3. Как перейти от выражения угловой скорости в мин -1 к ее выражению рад/с?
4. Что называют массой тела? Назовите единицу измерения массы
5. При каком движении материальной точки возникает сила инерции? Чему равно ее численное значение, как она направлена?
6. Сформулируйте принцип Даламбера
7. Возникает ли сила инерции при равномерном криволинейном движении материальной точки?
8. Что такое вращающий момент?
9. Как выражается зависимость между вращающим моментом и угловой скорости при данной передаваемой мощности?
10. Основное уравнение динамики для вращательного движения.
Практическая работа №7
«Расчет конструкций на прочность»
Цель работы: определять прочность, размеры сечения и допускаемую нагрузку
Теоретическое обоснование.
Зная силовые факторы и геометрические характеристики сечения при деформации растяжение (сжатие), мы можем определить напряжение по формулам. А что бы понять, выдержит ли наша деталь (вал, шестерня и т. д.) внешнюю нагрузку. Необходимо эту величину сравнить с допустимым напряжением.
Итак, уравнение статической прочности
На его основании решают 3 типа задач:
1) проверка прочности
2) определение размеров сечения
3) определение допускаемой нагрузки
Итак, уравнение статической жёсткости
На его основании решают также 3 типа задач
Уравнение статической прочности при растяжении (сжатии)
![]()
1) Первый тип - проверка прочности
![]() ,
,
т. е. решаем левую часть и сравниваем с допускаемым напряжением.
2) Второй тип - определение размеров сечения
![]()
из правой части площадь поперечного сечения
 Сечение круг
Сечение круг
отсюда диаметр d
Сечение прямоугольник

Сечение квадрат

A = a² (мм²)
Сечение полукруг

Сечения швеллер, двутавр, уголок и т. д.
Значения площади - из таблицы, принимается по ГОСТ
3) Третий тип - определение допустимой нагрузки;
![]()
принимается в меньшую сторону, целое число
ЗАДАНИЕ
Задача
А) Проверка прочности (проверочный расчет)
Для заданного бруса построить эпюру продольных сил и проверить прочность на обоих участках. Для материала бруса (сталь Ст3) принять ![]()
![]()
| № варианта | ||||||
| 12,5 | 5,3 | - | - | |||
| 2,3 | - | - | ||||
| 4,2 | - | - |
Б) Подбор сечения (проектный расчет)
Для заданного бруса построить эпюру продольных сил и определить размеры поперечного сечения на обоих участках. Для материала бруса (сталь Ст3) принять
| № варианта | ||
| 1,9 | 2,5 | |
| 2,8 | 1,9 | |
| 3,2 |
В) Определение допускаемой продольной силы
Для заданного бруса определить допускаемые значения нагрузок и ,
построить эпюру продольных сил. Для материала бруса (сталь Ст3) принять . При решении задачи считать, что на обоих участках бруса вид нагружения одинаков.
| № варианта | ||||
| - | - | |||
| - | - | |||
| - | - |

 Пример выполнения задания
Пример выполнения задания
Задача 1 (рисунок 1).
Проверить прочность колонны, выполненной из двутавровых профилей заданного размера. Для материала колонны (сталь Ст3) принять допускаемые напряжения при растяжении ![]() и при сжатии
и при сжатии ![]() . В случае наличия перезагрузки или значительной недогрузки подобрать размеры двутавров, обеспечивающие оптимальную прочность колонны.
. В случае наличия перезагрузки или значительной недогрузки подобрать размеры двутавров, обеспечивающие оптимальную прочность колонны.
Решение.
Заданный брус имеет два участка 1, 2. Границами участков являются сечения, в которых приложены внешние силы. Так как силы, нагружающие брус, расположены по его центральной продольной оси, то в поперечных сечениях возникает лишь один внутренний силовой фактор – продольная сила , т.е. имеет место растяжение (сжатие) бруса.

Для определения продольной силы применяем метод сечений метод сечений. Проводя мысленно сечение в пределах каждого из участков, будем отбрасывать нижнюю закрепленную часть бруса и оставлять для рассмотрения верхнюю часть. На участке 1 продольная сила постоянна и равна
Знак минус указывает на то, что на обоих участках брус сжат.
Строим эпюру продольных сил . Проведя параллельно оси бруса базовую (нулевую) линию эпюры, откладываем перпендикулярно ей в произвольном масштабе полученные значения . Как видим, эпюра оказалась очерчена прямыми линиями, параллельными базовой.
Выполняем проверку прочности бруса, т.е. определяем расчетное напряжение (для каждого участка в отдельности) и сравниваем его с допускаемым. Для этого используем условие прочности при сжатии
![]()
где площадь является геометрической характеристикой прочности поперечного сечения. Из таблицы прокатной стали берем:
для двутавра
для двутавра
Проверка прочности:
Значения продольных сил взяты по абсолютной величине.
Прочность бруса обеспечена, однако имеет место значительная (более 25%) недогрузка, что недопустимо вследствие перерасхода материала.
Из условия прочности определяем новые размеры двутавра для каждого из участков бруса:
Отсюда требуемая площадь
По таблице ГОСТа выбираем двутавр № 16 , для которого ;
Отсюда требуемая площадь
По таблице ГОСТа выбираем двутавр №24, для которого ;
При выбранных размерах двутавров также имеет место недогрузка, однако незначительная (менее 5%)
Задача №2.
Для бруса с заданными размерами поперечного сечения определить допускаемые значения нагрузок и . Для материала бруса (сталь Ст3) принять допускаемые напряжения при растяжении ![]() и при сжатии
и при сжатии ![]() .
.

Решение.
Заданный брус имеет два участка 1, 2. Имеет место растяжение (сжатие) бруса.
Применяя метод сечений, определяем продольную силу , выражая ее через искомые силы и . Проводя в пределах каждого из участков сечение, будем отбрасывать левую часть бруса и оставлять для рассмотрения правую часть. На участке 1 продольная сила постоянна и равна
На участке 2 продольная сила также постоянна и равна
Знак плюс указывает на то, что на обоих участкахбрус растянут.
Строим эпюру продольных сил . Эпюра очерчена прямыми линиями, параллельными базовой.

Из условия прочности при растяжении определяем допускаемые значения нагрузок и предварительно вычислив площади заданных поперечных сечений:
![]()
![]()
Контрольные вопросы.
1. Какие внутренние силовые факторы возникают в сечении бруса при растяжении и сжатии?
2. Запишите условие прочности при растяжении и сжатии.
3. Как назначают знаки продольной силы и нормального напряжения?
4. Как изменится величина напряжения, если площадь поперечного сечения возрастет в 4 раза?
5. Различаются ли условия прочности при расчете на растяжение и расчете на сжатие?
6. В каких единицах измеряется напряжение?
7. Какая из механических характеристик выбирается в качестве предельного напряжения для пластичных и хрупких материалов?
8. В чем разница между предельным и допускаемым напряжением?
Практическая работа №8
«Решение задач по определению главных центральных моментов инерции плоских геометрических фигур»
Цель работы: определить аналитическим путем моменты инерции плоских тел сложной формы
Теоретическое обоснование. Координаты центра тяжести сечения можно выразить через статический момент:
![]()
где относительно оси Оx
относительно оси Оy
Статический момент площади фигуры относительно оси, лежащей в этой же плоскости, равен произведению площади фигуры на расстояние ее центра тяжести до этой оси. Статический момент имеет размерность . Статический момент может быть величиной положительной, отрицательной и равен нулю (относительно любой центральной оси).
Осевым моментом инерции сечения называется взятая по всему сечению сумма произведений или интеграл элементарных площадок на квадраты их расстояний до некоторой оси, лежащей в плоскости рассматриваемого сечения
Осевой момент инерции выражается в единицах - . Осевой момент инерции- величина всегда положительная и не равна нулю.
Оси, проходящие через центр тяжести фигуры, называются центральными. Момент инерции относительно центральной оси называется центральным моментом инерции.
Момент инерции относительно какой-либо оси равен центра
Центром тяжести твердого тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела (рисунок 1.6).
Радиус-вектор этой точки

Рисунок 1.6
Для однородного тела положение центра тяжести тела не зависит от материала, а определяется геометрической формой тела.
Если удельный вес однородного тела γ , вес элементарной частицы тела
P k = γΔV k (P = γV ) подставить в формулу для определения r C , имеем
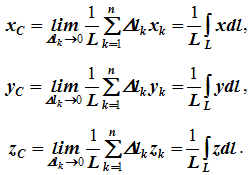
Откуда, проецируя на оси и переходя к пределу, получаем координаты центра тяжести однородного объема

Аналогично для координат центра тяжести однородной поверхности площадью S (рисунок 1.7, а)


Рисунок 1.7
Для координат центра тяжести однородной линии длиной L (рисунок 1.7, б)
Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).
2 Метод симметрии . Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3 Экспериментальный (метод подвешивания тела).
4 Разбиение . Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1 ) и C 2 (x 2 , y 2 ) . Тогда координаты центра тяжести тела равны


Рисунок 1.8
5Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры (рисунок 1.9):


Рисунок 1.9
Центры тяжести простейших фигур
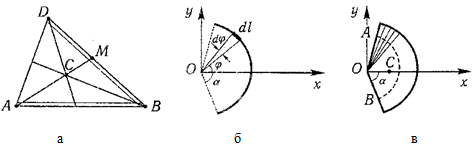
Рисунок 1.10
1 Треугольник
Центр тяжести площади треугольник совпадает с точкой пересечения его медиан (рисунок 1.10, а).
DM = MB , CM = (1/3)AM .
2 Дуга окружности
Дуга имеет ось симметрии (рисунок 1.10, б). Центр тяжести лежит на этой оси, т.е. y C = 0 .

dl – элемент дуги, dl = Rdφ , R – радиус окружности, x = Rcosφ , L = 2αR ,
Следовательно:
x C = R(sinα/α) .
3 Круговой сектор
Сектор радиуса R с центральным углом 2α имеет ось симметрии Ox , на которой находится центр тяжести (рисунок 1.10, в).
Разбиваем сектор на элементарные секторы, которые можно считать треугольниками. Центры тяжести элементарных секторов располагаются на дуге окружности радиуса (2/3)R .
Центр тяжести сектора совпадает с центром тяжести дуги AB :

14. Способы задания движения точки.
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:

Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t . Чтобы записать ее уравнение в явной форме, надо исключить из них t .
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t) . Этим способом удобно пользоваться, если траектория точки заранее известна.
15. 1.2 Скорость точки
Рассмотрим перемещение точки за малый промежуток времени Δt :
![]()
средняя скорость точки за промежуток времени Dt . Скорость точки в данный момент времени


Скорость точки – это кинематическая мера ее движения, равная производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета. Вектор скорости направлен по касательной к траектории точки в сторону движения.
Тема относительно проста для усвоения, однако крайне важна при изучении курса сопротивления материалов. Главное внимание здесь необходимо обратить на решение задач как с плоскими и геометрическими фигурами, так и со стандартными прокатными профилями.
Вопросы для самоконтроля
1. Что такое центр параллельных сил?
Центр параллельных сил есть точка, через которую проходит линия равнодействующей системы параллельных сил, приложенных в заданных точках, при любом изменении направления этих сил в пространстве.
2. Как найти координаты центра параллельных сил?
Для определения координат центра параллельных сил воспользуемся теоремой Вариньона.
Относительно оси x
M x (R) = ΣM x (F k) , - y C R = Σy kFk и y C = Σy kFk /Σ Fk .
Относительно оси y
M y (R) = ΣM y (F k) , - x C R = Σx kFk и x C = Σx kFk /Σ Fk .
Чтобы определить координату z C , повернем все силы на 90° так, чтобы они стали параллельны оси y (рисунок 1.5, б). Тогда
M z (R) = ΣM z (F k) , - z C R = Σz kFk и z C = Σz kFk /Σ Fk .
Следовательно, формула для определения радиус-вектора центра параллельных сил принимает вид
r C = Σr kFk /Σ Fk .
3. Что такое центр тяжести тела?
Центр Тяжести- неизменно связанная с твердым телом точка, через которую проходит равнодействующая сил тяжести, действующих на частицы этого тела при любом положении тела в пространстве. У однородного тела, имеющего центр симметрии (круг, шар, куб и т. д.), центр тяжести находится в центре симметрии тела. Положение центра тяжести твердого тела совпадает с положением его центра масс.
4. Как найти центр тяжести прямоугольника, треугольника, круга?
Для нахождения центра тяжести треугольника, необходимо нарисовать треугольник – фигуру, состоящую из трех отрезков, соединенных между собой в трех точках. Перед тем, как найти центр тяжести фигуры, необходимо, используя линейку, измерить длину одной стороны треугольника. В середине стороны поставьте отметку, после чего противоположную вершину и середину отрезка соедините линией, которая называется медианой. Тот же самый алгоритм повторите со второй стороной треугольника, а затем и с третьей. Результатом вашей работы станут три медианы, которые пересекаются в одной точке, которая будет являться центром тяжести треугольника. Если необходимо определить центр тяжести круглого диска однородной структуры, то для начала найдите точку пересечения диаметров круга. Она и будет центром тяжести данного тела. Рассматривая такие фигуры, как шар, обруч и однородный прямоугольный параллелепипед, можно с уверенностью сказать, что центр тяжести обруча будет находиться в центре фигуры, но вне ее точек, центр тяжести шара - геометрический центр сферы, и в последнем случае, центром тяжестью считается пересечение диагоналей прямоугольногопараллелепипеда.
5. Как найти координаты центра тяжести плоского составного сечения?
Метод разбиения: если плоскую фигуру можно разбить на конечное число таких частей, для каждой из которых положение центра тяжести известно, то координаты центра тяжести всей фигуры опредляются по формулам:
Х C = ( s k x k) / S; Y C = ( s k y k) / S,
где x k , y k - координаты центров тяжести частей фигуры;
s k - их площади;
S = s k - площадь всей фигуры.
6. Центр тяжести



1. В каком случае для определения центра тяжести достаточно определить одну координату расчетным путем?
В первом случае для определения центра тяжести достаточно определить одну координату Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1) и C 2 (x 2 , y 2) . Тогда координаты центра тяжести тела равны

Так как центры фигур лежат на оси ординат (х = 0), то находим только координату Ус .
2 Как учитывается площадь отверстия в фигуре 4 в формуле для определения центра тяжести фигуры?
Метод отрицательных масс
Этот метод заключается в том, что тело, имеющее свободные полости, считают сплошным, а массу свободных полостей – отрицательной. Вид формул для определения координат центра тяжести тела при этом не меняется.
Таким образом, при определении центра тяжести тела, имеющего свободные полости, следует применять метод разбиения, но считать массу полостей отрицательной.
иметь представление о центре параллельных сил и его свойствах;
знать формулы для определения координат центра тяжести плоских фигур;
уметь определять координаты центра тяжести плоских фигур простых геометрических фигур и стандартных прокатных профилей.
ЭЛЕМЕНТЫ КИНЕМАТИКИ И ДИНАМИКИ
Изучив кинематику точки, обратите внимание на то, что прямолинейное движение точки как неравномерное, так и равномерное всегда характеризуется наличием нормального (центростремительного) ускорения. При поступательном движении тела (характеризуемом движением любой его точки) применимы все формулы кинематики точки. Формулы для определения угловых величин тела, вращающегося вокруг неподвижной оси, имеют полную смысловую аналогию с формулами для определения соответствующих линейных величин поступательно движущегося тела.
Тема 1.7. Кинематика точки
При изучении темы обратите внимание на основные понятия кинематики: ускорение, скорость, путь, расстояние.
Вопросы для самоконтроля
1. В чем заключается относительность понятий покоя и движения?
Механическое движение -это изменение движения тела, или (его частей) в пространстве относительно др. тел с течением времени. Полет брошенного камня, вращение колеса- примеры механического движения.
2. Дайте определение основных понятий кинематики: траектории, расстоянию, пути, скорости, ускорению, времени.
Скорость – это кинематическая мера движения точки, характеризующая быстроту изменения ее положения в пространстве. Скорость является векторной величиной, т. е. она характеризуется не только модулем (скалярной составляющей), но и направлением в пространстве.
Как известно из физики, при равномерном движении скорость может быть определена длиной пути, пройденного за единицу времени: v = s/t = const (предполагается, что начало отсчета пути и времени совпадают). При прямолинейном движении скорость постоянна и по модулю, и по направлению, а ее вектор совпадает с траекторией.
Единица скорости в системе СИ определяется соотношением длина/время, т. е. м/с.
Ускорение есть кинематическая мера изменения скорости точки во времени. Другими словами - ускорение - это скорость изменения скорости.
Как и скорость, ускорение является величиной векторной, т. е. характеризуется не только модулем, но и направлением в пространстве.
При прямолинейном движении вектор скорости всегда совпадает с траекторией и поэтому вектор изменения скорости тоже совпадает с траекторией.
Из курса физики известно, что ускорение представляет собой изменение скорости в единицу времени. Если за небольшой промежуток времени Δt скорость точки изменилась на Δv, то среднее ускорение за данный промежуток времени составило: а ср = Δv/Δt.
Среднее ускорение не дает представление об истинной величине изменения скорости в каждый момент времени. При этом очевидно, что чем меньше рассматриваемый промежуток времени, во время которого произошло изменение скорости, тем ближе значение ускорения будет к истинному (мгновенному).
Отсюда определение: истинное (мгновенное) ускорение есть предел, к которому стремится среднее ускорение при Δt, стремящемся к нулю:
а = lim а ср при t→0 или lim Δv/Δt = dv/dt.
Учитывая, что v = ds/dt, получим: а = dv/dt = d 2 s/dt 2 .
Истинное ускорение в прямолинейном движении равно первой производной скорости или второй производной координаты (расстояния от начала отсчета перемещения) по времени. Единица ускорения - метр, деленный на секунду в квадрате (м/с 2).
Траектория
- линия в пространстве, вдоль которой движется материальная точка.
Путь
- это длина траектории. Пройденный путь l равен длине дуги траектории, пройденной телом за некоторое время t. Путь – скалярная величина.
Расстояние определяет положение точки на ее траектории и отсчитывается от некоторого начала отсчета. Расстояние является алгебраической величиной, так как в зависимости от положения точки относительно начала отсчета и от принятого направления оси расстояний оно может быть и положительным, и отрицательным. В отличие от расстояния путь, пройденный точкой, всегда определяется положительным числом. Путь совпадает с абсолютным значением расстояния только в том случае, когда движение точки начинается от начала отсчета и совершается по траектории в одном направлении.
В общем случае движения точки путь равен сумме абсолютных значений пройденных точкой расстояний за данный промежуток времени:
3. Какими способами может быть задан закон движения точки?
1.Естественный способ задания движения точки.
При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении. Чтобы задать закон движения точки естественным способом необходимо:
1) знать траекторию движения;
2) установить начало отсчета на этой кривой;
3) установить положительное направление движения;
4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪OM=S(t) .
2.Векторный способ задания движения точки
В этом случае положение точки на плоскости или в пространстве определяется вектором-функцией. Этот вектор откладывается от неподвижной точки, выбранной за начало отсчета, его конец определяет положение движущейся точки.
3.Координатный способ задания движения точки
В выбранной системе координат задаются координаты движущейся точки как функции от времени. В прямоугольной декартовой системе координат это будут уравнения:
4. Как направлен вектор истинной скорости точки при криволинейном движении?
При неравномерном движении точки модуль ее скорости с течением времени меняется.
Представим себе точку, движение которой задано естественным способом уравнением s = f(t).
Если за небольшой промежуток времени Δt точка прошла путь Δs, то ее средняя скорость равна:
vср = Δs/Δt.
Средняя скорость не дает представления об истинной скорости в каждый данный момент времени (истинную скорость иначе называют мгновенной). Очевидно, что чем меньше промежуток времени, за который определяется средняя скорость, тем ближе ее значение будет к мгновенной скорости.
Истинная (мгновенная) скорость есть предел, к которому стремится средняя скорость при Δt, стремящемся к нулю:
v = lim v ср при t→0 или v = lim (Δs/Δt) = ds/dt.
Таким образом, числовое значение истинной скорости равно v = ds/dt.
Истинная (мгновенная) скорость при любом движении точки равна первой производной координаты (т. е. расстояния от начала отсчета перемещения) по времени.
При Δt стремящемся к нулю, Δs тоже стремится к нулю, и, как мы уже выяснили, вектор скорости будет направлен по касательной (т. е. совпадает с вектором истинной скорости v). Из этого следует, что предел вектора условной скорости v п, равный пределу отношения вектора перемещения точки к бесконечно малому промежутку времени, равен вектору истинной скорости точки.
5. Как направлены касательное и нормальное ускорения точки?
Направление вектора ускорения совпадает с направлением изменения скорости Δ = - 0
Касательное ускорение в данной точке направлено по касательной к траектории движения точки; если движение ускоренное, то направление вектора касательного ускорения совпадает с направлением вектора скорости; если движение замедленное – то направление вектора касательного ускорения противоположно направлению вектора скорости.
6. Какое движение совершает точка, если касательное ускорение равно нулю, а нормальное не изменяется с течением времени?
Равномерное криволинейное движение характеризуется тем, что численное значение скорости постоянно (v = const ), скорость меняется лишь по направлению. В этом случае касательное ускорение равно нулю, так как v = const (рис.б),
![]()
а нормальное ускорение не равно нулю, так как r - конечная величина.
7. Как выглядят кинематические графики при равномерном и равнопеременном движении?
При равномерном движении тело за любые равные промежутки времени проходит равные пути. Для кинематического описания равномерного прямолинейного движения координатную ось OX удобно расположить по линии движения. Положение тела при равномерном движении определяется заданием одной координаты x . Вектор перемещения и вектор скорости всегда направлены параллельно координатной оси OX . Поэтому перемещение и скорость при прямолинейном движении можно спроецировать на ось OX и рассматривать их проекции как алгебраические величины.
При равномерном движении путь изменяется, согласно линейной зависимости . В координатах . Графиком является наклонная линия.

В результате изучения темы студент должен:
иметь представление о пространстве, времени, траектории; средней и истиной скорости;
знать способы задания движения точки; параметры движения точки по заданной траектории.
Инструкция
Следует учитывать, что положение центра масс напрямую зависит от того, каким образом распределена по объему тела его масса. Центр масс может даже не находиться в самом теле, примером такого объекта может служить однородное кольцо, у которого центр масс находится в его геометрическом центре. То есть – . При расчетах центр масс можно расценивать математической точкой, в которой сосредоточена вся масса тела.
Здесь R.ц.м. – радиус-вектор центра масс, mi – масса i-той точки, ri – радиус-вектор i-той точки системы. На практике во многих случаях легко найти центр масс, если предмет имеет некую строгую геометрическую форму. Например, у однородного стержня он находится точно посередине. У параллелограмма - на пересечении диагоналей, у треугольника это точка , а у правильного многоугольника центр масс находится в центре поворотной симметрии.
Для более сложных тел задача расчета усложняется, в этом случае необходимо разбить объект на однородные объемы. Для каждого из них отдельно центры масс, после чего найденные значения подставляются в соответствующие формулы и находится итоговое значение.
На практике необходимость определения центра масс (центра тяжести) обычно связана с конструкторскими работами. Например, при проектировании судна важно обеспечить его остойчивость. Если центр тяжести будет находиться очень , то может опрокинуться. Как рассчитать нужный параметр для такого сложного объекта, как судно? Для этого находятся центры тяжести его отдельных элементов и агрегатов, после чего найденные значения складываются с учетом их месторасположения. При конструировании центр тяжести обычно стараются расположить как можно ниже, поэтому наиболее тяжелые агрегаты располагают в самом низу.
Источники:
- Центр масс
- Решение задач по физике
Центр масс – важнейшая геометрическая и техническая характеристика тела. Без вычисления его координат невозможно представить конструирование в машиностроении, решение задач строительства и архитектуры. Точное определение координат центра массы производится с помощью интегрального исчисления.

Инструкция
Начинать всегда следует от , постепенно переходя к более сложным ситуациям. Исходите из того, что определению подлежит центр массы непрерывной плоской фигуры D, которой ρ постоянна и равномерно распределена в ее пределах. Аргумент х изменяется от а до b, y от c до d. Разбейте фигуру сеткой вертикальных (x=x(i-1), x=xi (i=1,2,…,n)) и горизонтальных прямых (y=y(j-1), y=xj (j=1,2,…,m)) на элементарные прямоугольники с основаниями ∆хi=xi-x(i-1) и высотами ∆yj=yj-y(j-1) (см. рис. 1). При этом середину элементарного отрезка ∆хi найдите как ξi=(1/2), а высоту ∆yj как ηj=(1/2). Поскольку плотность распределяется равномерно, то центр массы элементарного прямоугольника совпадет с ее геометрическим центром. То есть Хцi=ξi, Yцi=ηj.

Массу М плоской фигуры (если она неизвестна), вычислите как произведение на площадь. Замените элементарную площадь на ds=∆хi∆yj=dxdy. Представьте ∆mij в виде dM=ρdS=ρdxdy и получите ее массу по формуле, приведенной на рисунке. 2a. При малых приращениях считайте, что ∆mij, сосредоточена в материальной точке с координатами Хцi=ξi, Yцi=ηj. Из задач известно, что каждая координата центра масс системы материальных точек равна дроби, числитель которой сумму статических моментов масс mν относительно соответствующей оси, а равен сумме этих масс. Статический момент массы mν, относительно оси 0х равен уν*mν, а относительно 0у хν*mν.

Примените это к рассматриваемой ситуации и получите приблизительные значения статических моментов Јх и Ју в виде Ју≈{∑ξνρ∆xν∆yν}, Јх≈{∑ηνρ∆xν∆yν} (суммирование производилось по ν от 1 до N). Входящие в последнее выражения суммы являются интегральными. Перейдите к пределам от них при ∆хν→0 ∆yν→0 и запишите окончательные (см. рис. 2b). Координаты центра масс находите делением соответствующего статистического момента на общую массу фигуры М.
Методология получения координат центра масс пространственной фигуры G отличается лишь тем, что возникают тройные интегралы, а статические моменты рассматриваются относительно координатных плоскостей. Не следует забывать и что плотность не обязательно постоянна, то есть ρ(x,y,z)≠const. Поэтому окончательный и самйы общий имеет вид (см. рис. 3).

Источники:
- Пискунов Н.С. Дифференциальное и интегральное исчисления. Т.2., М.: 1976, 576 с., ил.
Закон всемирного тяготения, открытый Ньютоном в 1666 году и опубликованный в 1687 году, гласит, что все тела, обладающие массой, притягиваются друг к другу. Математическая формулировка позволяет не только установить сам факт взаимного притяжения тел, но и измерить его силу.

Инструкция
Еще до Ньютона многие высказывали предположения о существовании всемирного тяготения. С самого начала им было очевидно, что притяжение между любыми двумя телами должно зависеть от их массы и ослабевать с расстоянием. Иоганн Кеплер, первым описавший эллиптические орбиты Солнечной системы, считал, что Солнце притягивает с силой, обратно пропорциональной расстоянию.
Окончательно закон всемирного тяготения формулируется так: любые два тела, обладающие массой, взаимно притягиваются, и сила их притяжения равна
F = G* ((m1*m2)/R^2),
где m1 и m2 - массы тел, R - расстояние , G - гравитационная постоянная.
Если тело, участвующее в тяготении, обладает приблизительно сферической формой, то расстояние R следует отмерять не от его поверхности, а от центра масс. Материальная точка с той же массой, находящаяся точно в центре, порождала бы точно такую же силу притяжения.
В частности, это значит, что, например, при расчете силы, с которой Земля притягивает стоящего на ней , расстояние R равно не нулю, а радиусу . На самом деле оно равно расстоянию между центром Земли и центром тяжести человека, но этой разницей можно пренебречь без потери точности.
Гравитационное притяжение всегда взаимно: не только Земля притягивает человека, но , в свою очередь, притягивает Землю. Из-за огромной разницы между массой человека планеты это незаметно. Аналогично и при расчетах траекторий космических аппаратов обычно пренебрегают тем, что аппарат притягивает к себе планеты и кометы.
Однако если массы взаимодействующих объектов сравнимы, то их взаимное притяжение становится заметным для всех участников. Например, с точки зрения физики не вполне верно говорить, что Луна вращается вокруг Земли. В действительности Луна и Земля вращаются вокруг общего центра масс. Поскольку наша планета намного больше своего естественного , то этот центр находится внутри нее, но все же с центром самой Земли не совпадает.
Видео по теме
Источники:
- Классная физика для любознательных - закон всемирного тяготения
Математика и физика, возможно, самые удивительные науки из доступных человеку. Описывая мир через вполне определенные и поддающиеся расчету законы, ученые могут «на кончике пера» получить значения, измерить которые, на первый взгляд, кажется невозможным.

Инструкция
Один из базовых законов физики – закон всемирного тяготения. Он гласит, что все тела притягиваются друг к другу с силой, равной F=G*m1*m2/r^2. При этом G является определенной константой (будет указана непосредственно во время расчета), m1 и m2 массы тел, а r –расстояние между ними.
Массу Земли можно вычислить на основе эксперимента. При помощи маятника и секундомера можно рассчитать ускорение свободного падения g (шаг будет опущен за несущественностью), равное 10 м/c^2. Согласно второму закону Ньютона F можно представить как m*a. Поэтому, для тела, притягивающегося к Земле: m2*a2=G*m1*m2/r^2, где m2 – масса тела, m1 – масса Земли, a2=g. После преобразований (сокращения m2 в обеих частях, переноса m1 влево, а a2 - вправо) уравнение примет следующий вид: m1=(ar)^2/G. Подстановка значений дает m1=6*10^27
Расчет массы Луны опирается на правило: от тел до центра масс системы обратно пропорциональны массам тел. Известно, что Земля и Луна обращаются вокруг некоторой точки (Цм), причем расстояния от центров до этой точки как 1/81,3. Отсюда Мл=Мз/81,3=7.35*10^25.
Дальнейшие вычисления опираются на 3-ий закон Кепплера, согласно которому (T1/T2)^2*(M1+Mc)/(M2+Mc)=(L1/L2)^3, где T – период обращения небесного тела вокруг Солнца , L – расстояние до последнего, M1, M2 и Mc – массы двух небесных тел и , соответственно. Составив уравнения для двух систем ( +луна – / земля - луна) можно увидеть, что одна часть уравнения получается общей, а значит, вторые можно приравнять.
Расчетной формулой в наиболее общем виде является Lз^3/(Tз^2*(Mc+Мз)=Lл^3/(Tл^2*(Mз+Мл). Массы небесных тел были вычислены теоретически, периоды обращения находятся практически, для расчета L используются исчисления либо практические методы. После упрощения и подстановки необходимых значений уравнение примет вид: Мс/Мз+Мл=329.390. Отсюда Мс=3,3*10^33.
Кинетическая энергия – это энергия механической системы, которая зависит от скоростей движения каждой из ее точек. Другими словами, кинетическая энергия представляет собой разницу между полной энергией и энергией покоя рассматриваемой системы, та часть полной энергии системы, которая обусловлена движением. Кинетическая энергия делится на энергию поступательного и вращательного движения. Единицей измерения кинетической энергии в системе СИ является Джоуль.

Инструкция
В случае поступательного движения все точки системы (тела) имеют одинаковые скорости движения, которые равны скорости движения центра масс тела. При этом кинетическая системы Тпост равна:
Tпост = ? (mk Vс2)/2,
где mk –масса тела, Vс – центра масс.Таким образом, при поступательном тела кинетическая энергия равна произведению массы тела на квадрат скорости центра масс, деленному на два. При этом значение кинетической не зависит от движения.


















